![[イベント開催][『ソーシャルビジネス3.0』 ― 子ども支援の新たなインフラ「ミラインカム」の挑戦 ―民間による“子どもベーシックインカム”の実現に向けたシンポジウム開催]](/images/prtimes/a/9/a92a97febd0820f701b214929ec73dcc.png)
低軌道衛星通信を活用した移動型遠隔手術システム 世界初の実証実験に成功
リバーフィールド株式会社

2024年7月31日
<報道発表資料>
一般社団法人徳洲会
国立大学法人大阪大学
リバーフィールド株式会社
徳洲会グループの本部機能を有する一般社団法人徳洲会(東京本部:東京都千代田区、理事長:東上 震一、以下「徳洲会グループ」)、国立大学法人大阪大学(本部:大阪府吹田市、総長:西尾 章治郎) 大学院医学系研究科、リバーフィールド株式会社(本社:東京都港区、代表取締役:只野耕太郎、以下「リバーフィールド」)は、2024年6月30日(日)、大阪府八尾市の八尾徳洲会総合病院において、低軌道衛星通信を用いた移動型遠隔手術システムの実証実験(以下、「本実証」)を世界で初めて実施しました。
衛星通信による遠隔手術は古くから理論的には可能とされてきましたが、これまでは試作ロボットと高額な衛星通信システムを用いた実験レベルにとどまっていました。本実証は、薬事承認された手術支援ロボットと、安価で常用利用が可能な衛星通信サービスを活用し、世界で初めて「実用レベルで」遠隔ロボット手術の実現可能性を検証したものです。
災害が多く、インフラの壊滅的被害により、地上通信網が使用不能となりえる我が国において、このような取り組みを世界に先駆けて実施できたことは大変意義深いと考えます。

八尾徳洲会総合病院
・背景
日本の地方部では深刻な医師不足が続いており、高度な医療へのアクセスが困難な状況にあります。遠隔手術システムは、この問題解決の「切り札」と期待され、研究開発が進められてきましたが、通信インフラの整備にかかるコストや災害時のシステムの脆弱性が課題となっていました。近年、ロボット制御技術や低軌道衛星通信技術が急速な発展を見せており、低コストで強靭な遠隔医療システムが現実味を帯びつつあります。
・実証実験の内容
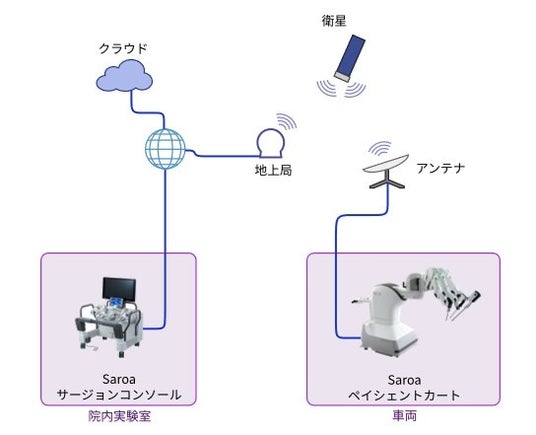
本実証では、リバーフィールドが開発した手術支援ロボット「Saroa サージカルシステム」を以下のように配置し、実験を実施しております。
- サージョンコンソール(操作側):八尾徳洲会総合病院の手術室内
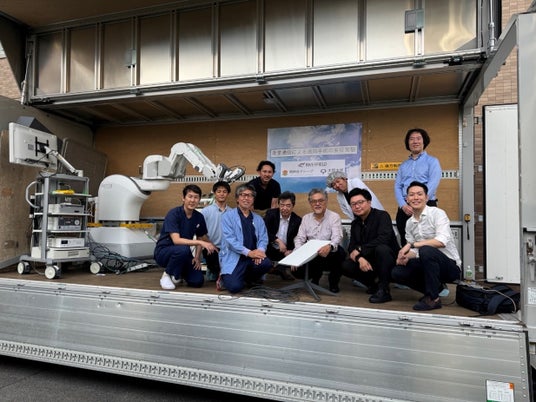
- ペイシェントカート(患者側):屋外に配置したトラック内
低軌道衛星通信には、米国スペースX社が運営する「スターリンク」のサービスを利用しました。また、接続のフレキシビリティを確保するため、クラウド上に中継用VPNサーバーを設置しています。
実験には6名の外科医が参加し、通常のロボット手術構成と遠隔のロボット手術構成での比較を行いました。臓器の弾力性を再現したトレーニング用モデルを用いて、縫合・結紮などの手技(傷口を縫い合わせたり、糸を結んで固定したりする作業のこと)を行いました。
なお、「Saroa サージカルシステム」は2023年5月に日本国内にて薬事承認を取得しましたが、衛星通信や、その他通信を用いた地理的に離れた施設間での遠隔手術は、薬事承認範囲に含まれていないことより、本実証には本実証専用機を用いました。
・結果
実験に参加した医師6名全員から、遠隔のロボット手術構成においても、通常のロボット手術時と同様、縫合や結紮などの繊細な手技が可能であることが確認されました。さらに、フルHD画質、4Mbpsの滑らかな映像伝送に成功しました。また、中継用VPNサーバーにより、固定IPアドレスのない環境でも安定した接続性の確保が確認されました。

実験の様子 サージョンコンソール(操作側)

実験の様子 ペイシェントカート(患者側)
・低軌道衛星通信の優位性
低遅延・高速大容量通信が可能
低軌道衛星は、地球に近い軌道(高度2,000km以下)を周回するため、静止軌道衛星(高度約36,000km)と比較して、信号の往復時間が大幅に短縮されます。これにより、手術に必要な即時性の高い信号伝達が可能となり、4K映像などの大容量データもスムーズに送受信することができるようになりました。
車載システムとの親和性が高い
低軌道衛星通信用のアンテナは小型・軽量であるため、移動車両への搭載が容易です。これにより、手術ロボットを搭載したトラックを必要な場所へ迅速に移動させることができます。
地理的制約を受けにくい
従来の地上波通信インフラが整備されていない山間部や離島などでも、空が見通せる環境があれば通信が可能となるため、医療過疎地域や遠隔地においても、都市部と同等の高度な医療サービスを提供できるようになるものと期待されます。
災害時にも強い通信インフラ
地震や洪水などの自然災害により、地上の通信インフラが損壊した場合でも衛星通信は影響を受けにくく、また、災害発生直後の混乱した状況下でも、迅速に通信環境を確立できるという利点があり、大規模災害時・緊急時の医療支援に大きな役割を果たすことが期待されます。
・今後の展望
本システムは、へき地・離島と都市部の医療格差の是正、災害時の迅速な医療支援、さらには国境を越えた医療支援活動や、あらゆる地域の医師らのトレーニングに幅広く活用できる可能性があります。
各機関コメント
リバーフィールド 代表取締役 只野耕太郎
この成果は、医療のあり方を根本から変える可能性を秘めています。地理的な制約を超えて、誰もが
高度な医療を受けられる社会の実現に向けて、さらなる技術開発を進めてまいります。
徳洲会グループ 大橋壯樹 医療法人徳洲会副理事長
徳洲会グループは、離島・へき地でも先端的な医療をという理念の下、これらの地に多くの病院・
診療所を設けてきました。今回の実証実験で、これら施設を先端的な技術でつなぎ、日常診療として
遠隔ロボット手術を実施できる可能性が見えてきました。大変意義深いことと思っています。
大阪大学 大学院医学系研究科 次世代内視鏡治療学共同研究講座 中島清一特任教授(常勤)
遠隔ロボット手術は古くて新しいテーマ。長い間「理論的には可能だが、あくまで実験的な取り組み
に過ぎない」とされてきたが、近年のめざましい技術革新で急速に現実味を帯びてきたと思う。
技術的な課題は残っているが、企業とともに克服していきたい。
本実証の成功を足がかりに、引き続き研究開発を推進し、すべての人々に質の高い医療を提供する基盤づくりに貢献してまいります。
【実験実施医師】
・大橋 壯樹(医療法人徳洲会副理事長・名古屋徳洲会総合病院総長)
・木村 拓也(八尾徳洲会総合病院副院長 外科統括部長 肝臓外科部長 小児外科部長)
・高山 悟(名古屋徳洲会総合病院副院長 消化器外科部長)
・豊田 亮(八尾徳洲会総合病院外科医長)
・牛丸 裕貴(大阪国際がんセンター消化器外科医長)
・占部 翔一郎(大阪大学大学院医学系研究科次世代内視鏡治療学共同研究講座大学院生、大阪急性期・総合医療センター救急診療部医員)
【実験監修(実験プロトコル評価及びデータ分析、結果検証)】
・中島 清一(大阪大学大学院医学系研究科次世代内視鏡治療学共同研究講座 特任教授(常勤))
【実験運営】
・八鍬 貴則(八尾徳洲会総合病院中央手術部主任)
【ロボット制御システム及び衛星通信ネットワークシステムの構築】
・リバーフィールド
本実証実施者
本件に関する問い合わせ先
<研究に関すること>
八尾徳洲会総合病院
副院長/外科統括部長/肝臓外科部長/小児外科部長
木村 拓也
TEL:0729-93-8501(代表)
大阪大学大学院医学系研究科
次世代内視鏡治療学共同研究講座
特任教授(常勤) 中島 清一
TEL:06-6105-5250
E-mail: project_engine@me.com
リバーフィールド株式会社 広報担当
TEL:03-6822-9700
E-mail:interview_req@riverfieldinc2.com
<報道に関すること>
一般社団法人徳洲会 広報部
TEL:03-3288-5580(直通)
E-mail:kouhou@tokushukai.jp
大阪大学大学院医学系研究科 広報室
TEL: 06-6879-3387
E-mail: medpr@office.med.osaka-u.ac.jp
リバーフィールド株式会社 広報担当
TEL:03-6822-9700
E-mail:interview_req@riverfieldinc2.com
企業プレスリリース詳細へ
PR TIMESトップへ
2024年7月31日
<報道発表資料>
一般社団法人徳洲会
国立大学法人大阪大学
リバーフィールド株式会社
徳洲会グループの本部機能を有する一般社団法人徳洲会(東京本部:東京都千代田区、理事長:東上 震一、以下「徳洲会グループ」)、国立大学法人大阪大学(本部:大阪府吹田市、総長:西尾 章治郎) 大学院医学系研究科、リバーフィールド株式会社(本社:東京都港区、代表取締役:只野耕太郎、以下「リバーフィールド」)は、2024年6月30日(日)、大阪府八尾市の八尾徳洲会総合病院において、低軌道衛星通信を用いた移動型遠隔手術システムの実証実験(以下、「本実証」)を世界で初めて実施しました。
衛星通信による遠隔手術は古くから理論的には可能とされてきましたが、これまでは試作ロボットと高額な衛星通信システムを用いた実験レベルにとどまっていました。本実証は、薬事承認された手術支援ロボットと、安価で常用利用が可能な衛星通信サービスを活用し、世界で初めて「実用レベルで」遠隔ロボット手術の実現可能性を検証したものです。
災害が多く、インフラの壊滅的被害により、地上通信網が使用不能となりえる我が国において、このような取り組みを世界に先駆けて実施できたことは大変意義深いと考えます。
八尾徳洲会総合病院
・背景
日本の地方部では深刻な医師不足が続いており、高度な医療へのアクセスが困難な状況にあります。遠隔手術システムは、この問題解決の「切り札」と期待され、研究開発が進められてきましたが、通信インフラの整備にかかるコストや災害時のシステムの脆弱性が課題となっていました。近年、ロボット制御技術や低軌道衛星通信技術が急速な発展を見せており、低コストで強靭な遠隔医療システムが現実味を帯びつつあります。
・実証実験の内容
本実証では、リバーフィールドが開発した手術支援ロボット「Saroa サージカルシステム」を以下のように配置し、実験を実施しております。
- サージョンコンソール(操作側):八尾徳洲会総合病院の手術室内
- ペイシェントカート(患者側):屋外に配置したトラック内
低軌道衛星通信には、米国スペースX社が運営する「スターリンク」のサービスを利用しました。また、接続のフレキシビリティを確保するため、クラウド上に中継用VPNサーバーを設置しています。
実験には6名の外科医が参加し、通常のロボット手術構成と遠隔のロボット手術構成での比較を行いました。臓器の弾力性を再現したトレーニング用モデルを用いて、縫合・結紮などの手技(傷口を縫い合わせたり、糸を結んで固定したりする作業のこと)を行いました。
なお、「Saroa サージカルシステム」は2023年5月に日本国内にて薬事承認を取得しましたが、衛星通信や、その他通信を用いた地理的に離れた施設間での遠隔手術は、薬事承認範囲に含まれていないことより、本実証には本実証専用機を用いました。
・結果
実験に参加した医師6名全員から、遠隔のロボット手術構成においても、通常のロボット手術時と同様、縫合や結紮などの繊細な手技が可能であることが確認されました。さらに、フルHD画質、4Mbpsの滑らかな映像伝送に成功しました。また、中継用VPNサーバーにより、固定IPアドレスのない環境でも安定した接続性の確保が確認されました。
実験の様子 サージョンコンソール(操作側)
実験の様子 ペイシェントカート(患者側)
・低軌道衛星通信の優位性
低遅延・高速大容量通信が可能
低軌道衛星は、地球に近い軌道(高度2,000km以下)を周回するため、静止軌道衛星(高度約36,000km)と比較して、信号の往復時間が大幅に短縮されます。これにより、手術に必要な即時性の高い信号伝達が可能となり、4K映像などの大容量データもスムーズに送受信することができるようになりました。
車載システムとの親和性が高い
低軌道衛星通信用のアンテナは小型・軽量であるため、移動車両への搭載が容易です。これにより、手術ロボットを搭載したトラックを必要な場所へ迅速に移動させることができます。
地理的制約を受けにくい
従来の地上波通信インフラが整備されていない山間部や離島などでも、空が見通せる環境があれば通信が可能となるため、医療過疎地域や遠隔地においても、都市部と同等の高度な医療サービスを提供できるようになるものと期待されます。
災害時にも強い通信インフラ
地震や洪水などの自然災害により、地上の通信インフラが損壊した場合でも衛星通信は影響を受けにくく、また、災害発生直後の混乱した状況下でも、迅速に通信環境を確立できるという利点があり、大規模災害時・緊急時の医療支援に大きな役割を果たすことが期待されます。
・今後の展望
本システムは、へき地・離島と都市部の医療格差の是正、災害時の迅速な医療支援、さらには国境を越えた医療支援活動や、あらゆる地域の医師らのトレーニングに幅広く活用できる可能性があります。
各機関コメント
リバーフィールド 代表取締役 只野耕太郎
この成果は、医療のあり方を根本から変える可能性を秘めています。地理的な制約を超えて、誰もが
高度な医療を受けられる社会の実現に向けて、さらなる技術開発を進めてまいります。
徳洲会グループ 大橋壯樹 医療法人徳洲会副理事長
徳洲会グループは、離島・へき地でも先端的な医療をという理念の下、これらの地に多くの病院・
診療所を設けてきました。今回の実証実験で、これら施設を先端的な技術でつなぎ、日常診療として
遠隔ロボット手術を実施できる可能性が見えてきました。大変意義深いことと思っています。
大阪大学 大学院医学系研究科 次世代内視鏡治療学共同研究講座 中島清一特任教授(常勤)
遠隔ロボット手術は古くて新しいテーマ。長い間「理論的には可能だが、あくまで実験的な取り組み
に過ぎない」とされてきたが、近年のめざましい技術革新で急速に現実味を帯びてきたと思う。
技術的な課題は残っているが、企業とともに克服していきたい。
本実証の成功を足がかりに、引き続き研究開発を推進し、すべての人々に質の高い医療を提供する基盤づくりに貢献してまいります。
【実験実施医師】
・大橋 壯樹(医療法人徳洲会副理事長・名古屋徳洲会総合病院総長)
・木村 拓也(八尾徳洲会総合病院副院長 外科統括部長 肝臓外科部長 小児外科部長)
・高山 悟(名古屋徳洲会総合病院副院長 消化器外科部長)
・豊田 亮(八尾徳洲会総合病院外科医長)
・牛丸 裕貴(大阪国際がんセンター消化器外科医長)
・占部 翔一郎(大阪大学大学院医学系研究科次世代内視鏡治療学共同研究講座大学院生、大阪急性期・総合医療センター救急診療部医員)
【実験監修(実験プロトコル評価及びデータ分析、結果検証)】
・中島 清一(大阪大学大学院医学系研究科次世代内視鏡治療学共同研究講座 特任教授(常勤))
【実験運営】
・八鍬 貴則(八尾徳洲会総合病院中央手術部主任)
【ロボット制御システム及び衛星通信ネットワークシステムの構築】
・リバーフィールド
本実証実施者
本件に関する問い合わせ先
<研究に関すること>
八尾徳洲会総合病院
副院長/外科統括部長/肝臓外科部長/小児外科部長
木村 拓也
TEL:0729-93-8501(代表)
大阪大学大学院医学系研究科
次世代内視鏡治療学共同研究講座
特任教授(常勤) 中島 清一
TEL:06-6105-5250
E-mail: project_engine@me.com
リバーフィールド株式会社 広報担当
TEL:03-6822-9700
E-mail:interview_req@riverfieldinc2.com
<報道に関すること>
一般社団法人徳洲会 広報部
TEL:03-3288-5580(直通)
E-mail:kouhou@tokushukai.jp
大阪大学大学院医学系研究科 広報室
TEL: 06-6879-3387
E-mail: medpr@office.med.osaka-u.ac.jp
リバーフィールド株式会社 広報担当
TEL:03-6822-9700
E-mail:interview_req@riverfieldinc2.com
企業プレスリリース詳細へ
PR TIMESトップへ
(2024/07/31 14:00)
- データ提供
-

本コーナーの内容に関するお問い合わせ、または掲載についてのお問い合わせは株式会社 PR TIMES ( )までご連絡ください。製品、サービスなどに関するお問い合わせは、それぞれの発表企業・団体にご連絡ください。
)までご連絡ください。製品、サービスなどに関するお問い合わせは、それぞれの発表企業・団体にご連絡ください。
)までご連絡ください。製品、サービスなどに関するお問い合わせは、それぞれの発表企業・団体にご連絡ください。